Robot Localization and Mapping
Particle Filter Localization
Implemented a Particle Filter to estimate pose of a differential drive robot using measurements from a 180-degree laser range finder.
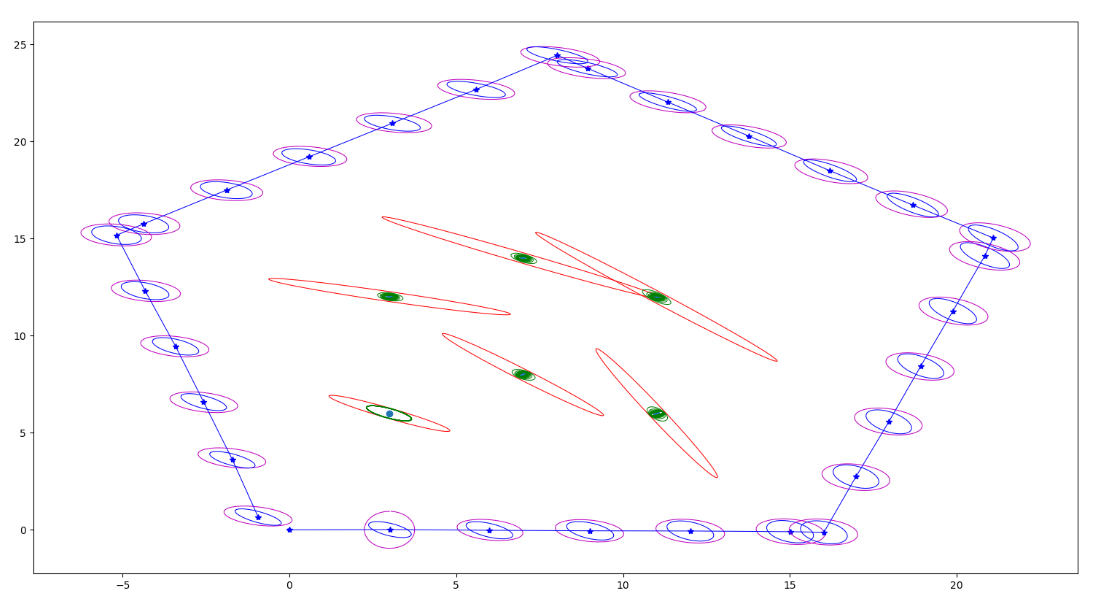
Extended kalman Filter SLAM
Implemented a 2D EKF-SLAM solver in Python to estimate the trajectory of a 2D robot and the positions of the landmarks from the control input and measurements in an unknown environment.
The magenta and blue ellipses represent the predicted and updated uncertainties of the robot’s position. The red and green ellipses represent the initial and updated uncertainties of the landmarks.
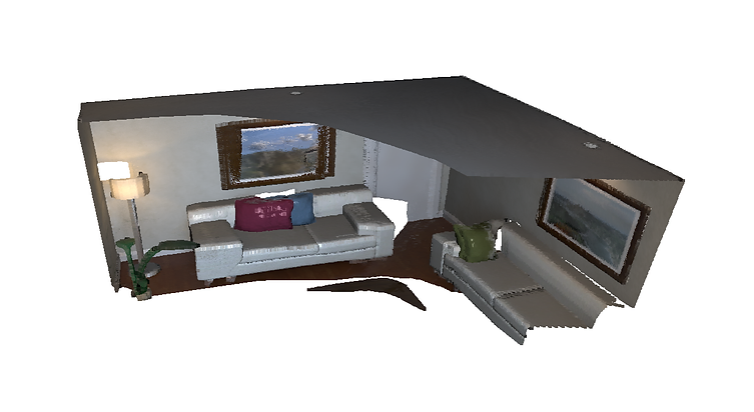
Dense 3D SLAM
- Implemented a 3D dense SLAM system using point-based fusion by utilizing projective Iterative Closest Point (ICP) algorithm and point-based fusion.
- The image shows the resultant 3D reconstruction obtained for the ICL-NUIM dataset