Planning and Decision Making in Robotics
Path Planning Towards a Moving Target
Implemented a Weighted A* planner to generate a plan for a point Robot (Pink) to catch a moving target (Green) on a 8-connected 2D grid.
Planning for N-DOF Arms
Implemented sampling-based planners to plan a collision-free path from a start to a goal position defined as joint angles for a high DOF planar arm.
RRT
RRT*
RRT-Connect
PRM
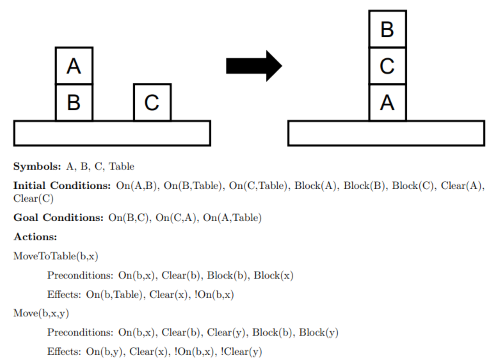
Symbolic Planner for Task Planning
Implemented a generic symbolic planner based on the STRIPS framework, and validated it on three environments - Blocks, Blocks and Triangles and Fire Extinguisher.